|
Intelligent Robot Lab
Brown University, Providence RIHome | People | Research | Publications | Joining | Software |
|
SoftwareWe have made the following software available to download under various open-source licenses:
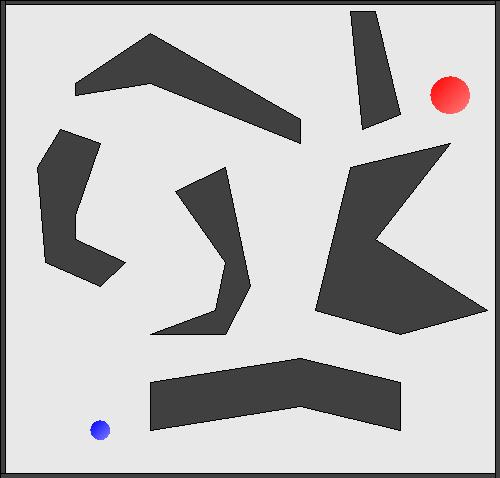
The Pinball Domain
(GPL)
The Pinball domain page contains a brief overview and Java source code, full documentation, an RL-Glue interface, and GUI programs for editing obstacle configurations, viewing saved trajectories, etc. Other versions:
The Pinball domain was originally described in:
The Fourier Basis
We contributed RL-Glue-compatible ε-greedy Sarsa(λ) Fourier Basis code to the RL-Library project. You can get the code, installation instructions, and a project overview at the RL Library community wiki. The code is in Java and is fully documented. (Apache License) We have also made available a (GPLv3 licensed) Python implementation of the Fourier basis, along with code for ε-greedy Sarsa(λ) and two RLGym examples, here: github.com/brownirl/fourier_vfa. Other versions:
The Fourier Basis is described in:
| ||

| ||